
Translate this page into:
A comprehensive review of evolution of advanced follicular unit excision systems
*Corresponding author: Kavish Chauhan, MD (Dermatology, Venereology and Leprosy) Department of Dermatology, Dermaclinix, The Complete Skin and Hair Solution Center, New Delhi, India. kavish_chouhan@yahoo.com
-
Received: ,
Accepted: ,
How to cite this article: Chauhan K, Tandon M, Kumar A, Taneja N, Hamid SA. A comprehensive review of evolution of advanced follicular unit excision systems. J Cutan Aesthet Surg. 2025;18:69-77. doi: 10.25259/JCAS_4_2024
Abstract
Initially, the application of the follicular unit excision (FUE) technique for hair transplantation faced a challenge due to a significant occurrence of hair follicle damage. However, advancements in techniques, punch designs, and tools have successfully addressed this issue. The integration of motorized equipment featuring rotation, roto-oscillation, oscillation, vibration, suction, and hydration has significantly improved the successful harvesting of grafts. More recently, the adoption of robotic technology for both graft extraction and incision is becoming increasingly common in FUE procedure. Given the wide range of available devices and technologies, hair transplant surgeons may find it challenging to select the most suitable option for their specific practices. The advancements in techniques, punch shapes, and motorized devices have played a key role in reducing the rate of follicle damage and increasing the speed of FUE procedures. It is crucial for hair restoration surgeons to stay informed about the various accessible devices and understand how these tools can be customized to suit the unique hair and skin characteristics of each patient.
Keywords
ARTAS robotic follicular unit excision
Dr. U Graft Zeus
Follicular unit excision
Follicular unit excision systems
INTRODUCTION
Over the years, hair transplantation has made notable advancements, beginning with the introduction of the Punch Hair Transplant technique by Dr. Orentreich in the 1950s.1,2 Since then, the field has developed further, incorporating additional methods like follicular unit transplantation in the 1990s and the most recent technique known as follicular unit excision (FUE). FUE is a technique that involves the extraction of hairs from the donor area, typically the scalp, but occasionally from the beard, chest, and other parts of the body in cases of advanced-grade baldness. This is done under local anesthesia using a circular punch with a diameter of less than a millimeter. The punch can be mounted on a manual handle, a motorized hand device, or, more recently, a robotic device. The term “follicular unit extraction” was coined by Rassman et al. in 2002.3 The modern era of FUE can be attributed to the contributions of several surgeons, including Woods, Rassman, Cole, Harris, and Rose.
Over time, FUE has undergone various stages of development, progressing from manual to motorized tools and using precise punches with depth control, rotating punches with blunt tips, and various punch shapes such as flared, hybrid and edge out. These modifications aim to avoid unintentional cutting of follicles beneath the skin, resulting in better preservation during the transplantation process. The introduction of motorized devices that incorporate rotation, roto-oscillation, oscillation, vibration, suction, and hydration has further enhanced the effective extraction of grafts. Lately, the use of robots for both extraction and incision is now being utilized in FUE procedures.
A broad range of punches can be found in the market, each featuring distinct punch tip designs. These punches can be categorized into sharp punches, blunt punches, and hybrid punches. Sharp punches excel in cutting, whereas blunt and hybrid punches are more effective for tissue dissection. In contrast to the sharp punch, the blunt punch was discovered to yield the highest graft: Hair ratio and the lowest rate of follicular damage.4
MOTORIZED MOVEMENTS IN FUE DEVICES
Rotation
By rotating the punch, a rotational force (torque) is generated, reducing the amount of axial force needed to penetrate the tough epidermis.5 This is particularly advantageous for blunt punches with a thick wall. Rotating the punch is especially useful when removing grafts at an angle where only a small part of the punch makes the initial incision on the skin.6 Sharp punches require less force than blunt punches to make the initial cut. However, using excessive force can cause the targeted follicular unit to become misaligned and result in follicle damage.
Oscillation
Oscillatory movement is especially useful when the punch is deeply embedded in the dermis, as it assists in graft excision with reduced torsional stress compared to rotational movement.7-9 This is a motion characterized by repetitive arcs that switch between clockwise and counterclockwise directions. The length of these arcs can be adjusted by the operator, and certain machines offer the option to control the speed of oscillation.
Roto-oscillation
Roto-oscillation combines rotational and oscillatory actions, typically starting with rotation and followed by oscillation.
Vibration
When the punch’s edge is deep within the dermal layer, and the excised graft is primarily located inside the punch, vibrating the punch can be beneficial. Unlike rotation, vibration does not impose significant torsional strain or only produces minimal amounts of it when oscillating. It helps gently loosen the graft within the punch and separate the perifollicular tissue from the punch walls. Typically, this movement is employed in conjunction with specific punch types such as the Harris hexagonal-shaped punch,10-13 the Trivellini Edge Out™ punch, and flared tip punches.9,14,15 Furthermore, ultrasonic frequencies have been used to vibrate the Dr UPunch Curl™, also known as Dr UGraft Sonic FUE™, as a technique that facilitates the extraction of grafts from thick skin.16
Multiphasic
Certain motorized FUE devices can perform the aforementioned movements in a specific order. Devices that have multiple phases and can be programmed to control the timing, speed, and order of various movements help in the removal of follicular units, all while reducing the physical strain on the surgeon.
Various FUE systems have been developed over the years, each with its advantages and disadvantages. They are divided into three types: Manual, motorized, and the robotic arm.
POWERED FUE DEVICES
Although utilizing a motorized or “powered” FUE extraction device can reduce the fatigue typically encountered by hair restoration surgeons during a hair transplant procedure and result in cleaner incisions with reduced friction, certain hair transplant surgeons believe that manual punches are easier to control and offer greater tactile feedback.
In 2004, the Cole Isolation Technique was introduced, which involved the use of a sharp, thin-walled punch with adjustable depth control. This allowed for the customization of incision depth to accommodate the unique characteristics of each patient’s follicular units and scalp. These punches were designed to cut slightly beneath the arrector pili muscle to efficiently release the follicular unit grafts.17,18
The various limitations of powered FUE devices are as follows: Longer learning curve with sharp punch, slow speed with blunt punches, higher transection rate in curly hair and body hair, and no in-built hydration of grafts and poor quality grafts with less tissue around the lower third of follicular unit.
Programmable Power Cole Isolation Device (PCID)
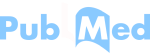
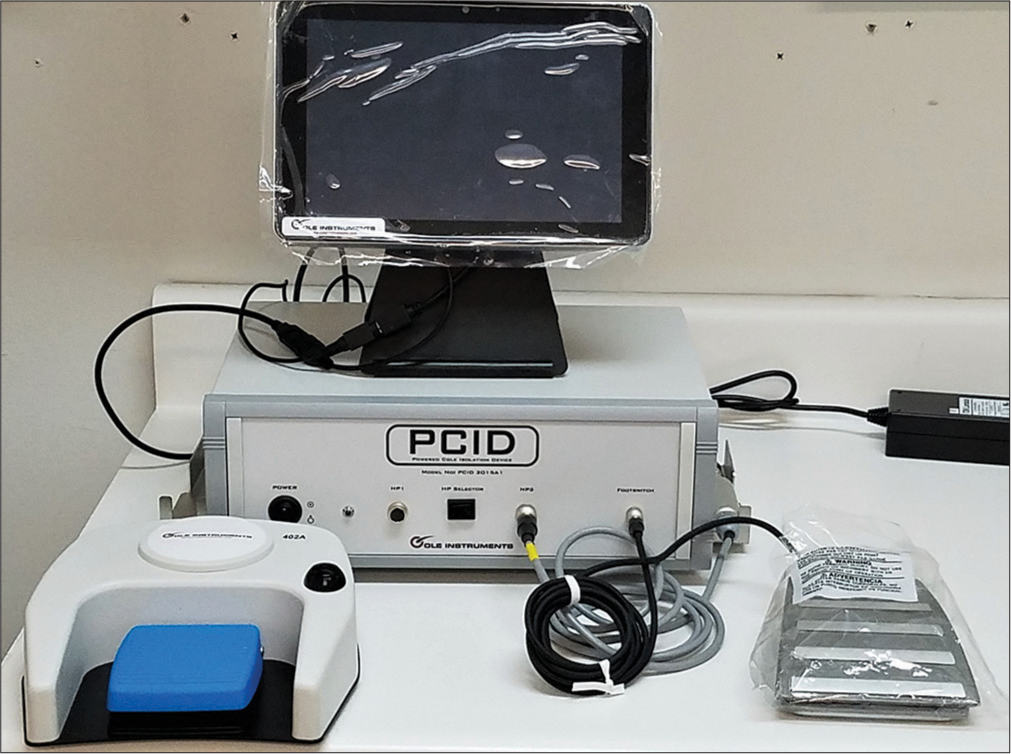
The Programmable Power Cole Isolation Device (PCID) system comprises several components, including a controller, a touch screen, a wired foot pedal, a wireless foot pedal, a hand piece (although two can be utilized), and two safe holders, as shown in Figure 1. Once the desired parameters are set on the touch screen, the device is activated by a foot pedal, which operates the hand piece and keeps track of the number of dissected grafts. These parameters encompass rotation, oscillation, a combination of rotation and oscillation (roto-oscillation), as well as a ramp function that allows for gradual changes in angle and speed. During the procedure, the handpiece incorporates a punch depth control feature that enables adjustment of the depth at which the punch dissects into the scalp, thus helping to limit its length.17,18 The more compact and portable forms are the Mini-Powered Cole Isolation Device and Cole Vortex device [Figure 2a and b].
- Programmable Power Cole Isolation Device. (Courtesy of Cole Instruments Inc, Alpharetta, GA).
- (a) Mini-powered Cole Isolation Device. (b) CDD-Vortex or Cole dissection device. (Courtesy of Cole Instruments Inc, Alpharetta, GA).
Harris SAFE system
The technique presented by Dr. James Harris in 2004 combines both manual and mechanical approaches for graft harvesting. Originally, the method involved using a sharp punch to create incisions in the skin’s dermis, followed by deeper dissection using an unsharpened, dull, or blunt punch developed by Dr. Harris. This two-step method was followed by graft removal using forceps.10-13 Later on, Dr. Harris devised a mechanism where his unsharpened punch was attached to a rotating drill. The mechanical version offers the surgeon the flexibility to carry out the procedure in a single step if desired (Powered SAFE Scribe as shown in Figure 3).19,20

- Harris SAFE system citation.
Certain experts claim that the powered SAFE Scribe’s blunt tip requires more oscillations or rotations to penetrate the scalp and reach the desired depth for extraction. This, according to them, leads to the excessive production of heat, tension, friction, and torsion on the grafts and the surrounding tissue.
Suction-assisted motorized devices
NeoGraft and SmartGraft are two hair transplantation machines readily available in the market. These devices utilize a handheld surgical tool (capable of both negative and positive pressure) equipped with rotating sharp punches to make incisions in the skin. The negative pressure feature enables the surgeon to draw the graft into a collection chamber, keeping the surgical area free of blood. To facilitate graft removal from the donor site, a deep incision is necessary to loosen the graft sufficiently for the gentle suction to take effect. Alternatively, grafts can also be extracted using forceps. In the recipient area, grafts can be inserted using positive pressure. The NeoGraft device shares similarities with the Calvitron, which was initially developed by Dr. Pascal Boudjema. In Asia, the device is commonly referred to as the Omnigraft [Figure 4].20,21

- Neograft.
The limitations of suction-assisted motorized devices are as follows: Higher rate of graft damage as the punch needs to penetrate deeper to fully sever the surrounding follicular tissues and desiccation of grafts due to dry suction.
True device
Dr. Robert True utilizes the Aseptico Porta-Tip – AEU-03SS and Osada SH28S handpieces in his practice as shown in Figure 5.20 These are rechargeable rotary hand engines equipped with variable speed control, and the handpieces are designed to be autoclavable. Dr. True employs Cole Instrument serrated punches ranging in size from 0.8 to 1.25 mm for the procedure. To ensure precise control of the incision depth, a silicone collar is placed on the punch and adjusted accordingly.

- True device.
Feller device
This battery-powered FUE device, created by Dr Alan Feller, is equipped with oscillating technology and features sharp internal diameter cutting-edge punches.
KD’S FUE station
This device integrates electropneumatic and physician control systems, offering a comprehensive array of features. It encompasses all stages of the FUE process, beginning with painless anesthesia and extending to the harvesting of follicular units, graft hydration, creation of recipient sites, and graft implantation [Figure 6].22-24 This device possesses three globally acknowledged patents for its automated graft hydration system. KD’s FUE extractor provides a precise and rapid extraction procedure that surpasses the capabilities of both traditional and motorized dental tools, even for inexperienced individuals. The motorized tool’s rotations per minute can be finely adjusted using a microprocessor-based control system, enabling physicians to minimize graft damage, even when operated by beginners. In addition, it incorporates automated incisions with human assistance and automated forceps expansion during graft implantation.

- KD’S follicular unit extraction Station (Courtesy: Dr Kuldeep Saxena).
Devroye device
Dr. Jean Devroye developed a battery-powered FUE device, the Devroye WAW system, that utilizes an oscillating sharp punch. This device is controlled by a highly sensitive foot pedal, enabling precise control over the oscillation of the punch, even allowing for very short oscillation durations. The use of a small oscillation arc prevents twisting and decreases torsional stress on the tissue, resulting in less damage compared to rotational movements.7,8 The main advantage of this technique is its ability to penetrate the skin to a considerable depth, typically ranging from 4 mm to 5 mm, while minimizing harm to the follicles.
In 2022, the new WAW DUO FUE System was introduced. The system, depicted in Figure 7a, incorporates several advancements compared to the traditional system. It consists of four main components: two handpieces, a pedal, and a tablet equipped with a dedicated application that provides three modes: Manual mode, automatic mode, and continuous mode [Figure 7b]. One of the handpieces is wireless, allowing users greater freedom of movement, while the second handpiece serves as a backup and is connected through a wire. Another notable enhancement is the addition of a multiphase capability, which involves two consecutive movements: a gentle rotation followed by oscillation. The serrated hybrid tornado punch, created in 2020, requires a significant amount of pressure to indent the skin. As a result, the teeth on its cutting edge make contact with the epidermis. Once the punch has overcome this initial challenge, it tends to separate the hypodermis rather than slicing through it.

- (a) Devroye WAW DUO follicular unit extraction system (Courtesy of Devroye instruments, Brussels). (b) Tablet equipped with a dedicated application that provides three modes: Manual mode, automatic mode, and continuous mode and customization of motions (Courtesy of Devroye instruments, Brussels).
Trivellini device
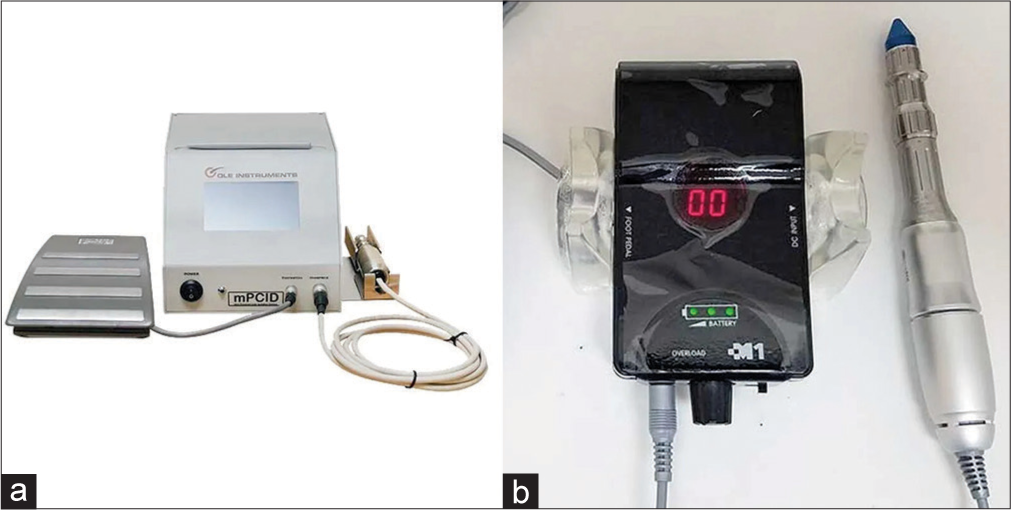
It is a highly adaptable programmable motor with multiple capabilities, including in-line suction, full rotation, oscillation, roto-oscillation (mamba mode), and vibration [Figure 8a]. Moreover, it employs a unique “Edge-Out” punch that is designed with thick walls and an internal bevel, placing the sharp cutting edge on the outer diameter and reducing the graft transection.25 The Trivellini System utilizes suction to create traction on the graft, stretching it and aiding in punch penetration. It incorporates a touch-sensitive feature known as the SmartReact™ system, which automatically activates pre-programmed suction and rotation/oscillation/roto-oscillation/vibration functions as soon as the device touches the skin around the follicular unit. This eliminates the need for a foot pedal and has been shown to improve graft quality, reduce damage, and make the extraction process gentler.9,14-16
- (a) Trivellini Standard system (Courtesy of Trivellini tech). (b) Trivellini Long Hair system (Courtesy of Trivellini tech).
The Trivellini Long Hair System offers the same features as the standard version, but it also includes a predetermined mode known as “long hair mode.” This mode combines a fixed alignment of the edge-out punch with slots with fine oscillation to facilitate the extraction of long hair grafts [Figure 8b].26
DR. U. GRAFT ZEUS
Dr. U. Graft Zeus [Figure 9a] stands out as an all-purpose FUE device, suitable for extracting hair from the scalp regardless of whether it’s shaved or not, making it suitable for individuals from various ethnic backgrounds.27 The key component is the Intelligent Punch – Dr U. Punch i, which is bazooka-shaped and has been refined at multiple levels to address numerous technical challenges associated with FUE graft attrition (lost or non-viable grafts from transections, crush injuries, and complete de-sheathing), poor scarring, and user experiences.28 Moreover, this system offers multiple advantages, including the ability to extract hair from the beard and body, as well as harvest long-haired grafts without the need for punch driver changes or specialized skills. It effectively tackles issues that can lead to inconsistent FUE device performance, such as variations in skin firmness and thickness. It also overcomes challenges related to unpredictable hair curliness and angles through its proprietary technology for navigating hair follicles, a common hurdle for FUE practitioners.
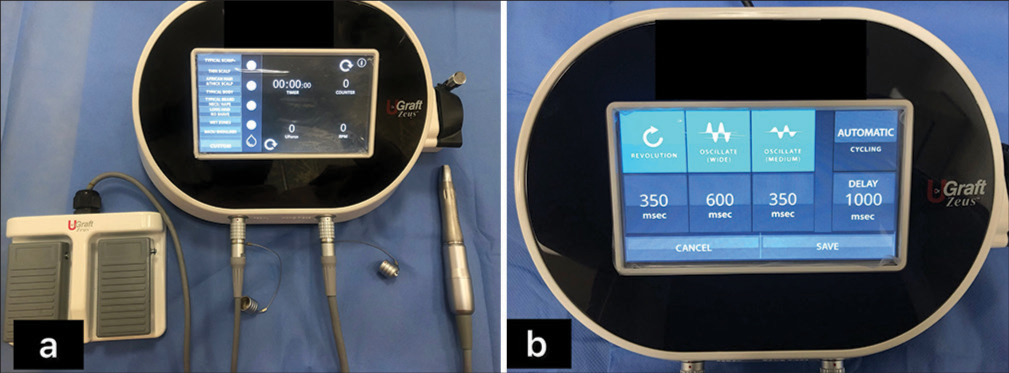
- (a) Dr U Graft Zeus device, consisting of the console, hand piece, foot pedal, and optional fluid integration. (b)The dashboard exhibits three different motion settings, customizable duration for movements, score intervals, and both automatic and manual modes.
Furthermore, the machine incorporates torque control that allows the punch to halt once it separates the graft from its lateral attachments, eliminating the need for practitioner experience or mechanical guards. Instead, the device relies on tissue resistance to determine the optimal depth. This intuitive approach eliminates the need for the practitioner to manually withdraw the punch. In contrast, previous devices lacked coordination between the punch and driver-torque, leading to the punch forcefully entering the skin without considering the tissue resistance and requiring operator intervention.
For user convenience, it features an intuitive dashboard with a personalized tab for inputting preferred settings, including speed, torque, and three distinct movement modes, as depicted in Figure 9b. In addition, the new driver system design includes an optional fluid flush system, further enhancing the device’s capabilities (known as Zeus Mariner).28
ARTAS ROBOTIC SYSTEM
The Food and Drug Administration has granted approval for the robotic system to be used on male patients with brown or black hair. This system includes exclusive imaging technology, a computer interface terminal, multiple video cameras, a video display, the robotic arm apparatus, a suction system for raising harvested grafts, and a comfortable chair for correct patient positioning during the procedure, as depicted in Figure 10.29

- ARTAS Robotic system.
After applying the tensioner, the system calculates the angle of variation between the exit point of the follicle and the structure of the follicular unit beneath the surface of the skin. The robotic arm is equipped with a dual-bore needle mechanism featuring a sharp tip for initial skin penetration and a surrounding blunt needle that goes deeper into the tissue, reducing the risk of hair transection and facilitating the easier removal of the chosen follicular units. The sharp needle is marked with graduations to help the physician gauge the depth of penetration. Using a mathematical algorithm that offers some degree of adjustability, the machine harvests follicular units in a random manner.30-32 Notably, this is the only system where the hair restoration specialist operates through a computer interface, eliminating the need to handle the punching tool and thereby reducing ergonomic strain.33
The advantages of the ARTAS system is that the learning curve in using the robotic device is considerably less than the time needed to master manual FUE. The robot excels at repetitive actions without getting fatigued and selects prime hair for harvesting. A significant benefit for a physician starting a career in hair restoration is that the robotic procedure reduces the requirement for assistants compared to a strip harvest.34 An assistant is employed to assist in controlling the robot through a computer terminal, while simultaneously, the physician guides the device and has the capability to manage the different harvesting parameters.32 The device can serve as a great marketing tool. The disadvantages of the system are the high cost of the machine, comparatively higher transection rate in lateral areas, especially the supra-auricular area due to acute angulation, areas with hair growing in different directions can pose difficulties for the robotic system and when working with the softer tissue of the nape, and the number of viable grafts that can be obtained tends to be lower. The robotic system is not very effective in patients who have previously undergone strip harvesting. The region around the scar often has significantly less dense hair, and the presence of fibrosis makes it hard for the robot to penetrate the skin. In addition, alterations in hair direction near the scar can lead to higher transection rates. Furthermore, like manual FUE procedures, harvesting curly and particularly tightly coiled hair, as commonly seen in individuals of African descent, can be more challenging for the robotic system.29 The key features of various devices used in FUE are summarized in Table 1. This knowledge and customization are crucial in order to achieve the most favorable outcomes when harvesting grafts during the procedure.
| Device | Motions (epidermis+ superficial dermis) | Motions (dermis) | Punch shape | Punch tip | Depth control | Suction |
|---|---|---|---|---|---|---|
| NeoGraft/Omnigraft | Rotation | Rotation | Cylindrical/round | Sharp | No | Yes |
| Programmable PCID | Rotation Oscillation Roto-oscillation |
Rotation with depth stop Oscillation Roto-oscillation |
Cylindrical/Round Window |
Sharp | Yes | No |
| Harris powered safe scribe (SAFE) | Rotation | Rotation with depth stop Vibration |
Cylindrical/Round | Blunt | Yes | No |
| True device: Aseptico Porta-Tip-AEU-03SS Osada SH28S handpiece |
Rotation | Rotation with depth stop | Serrated punch | Sharp | Yes | No |
| KD’s FUE Station | Rotation | Rotation | Cylindrical/Round | Sharp | No | No |
| Shiao 4-D device | Rotation | Rotation | Cylindrical/Round | Sharp | Yes | No |
| Devroye WAW system | Oscillation | Oscillation | Hybrid Tornado | Flat Serrated |
No | No |
| Devroye WAW DUO FUE system | Rotation Oscillation |
Oscillation | Hybrid Tornado | Flat Serrated | No | No |
| Trivellini system | Rotation Oscillation Roto-oscillation |
Roto-oscillation Oscillation Vibration |
Edge out Flared |
Sharp | No | Yes |
| Trivellini Long hair™ System |
Oscillation Roto-oscillation |
Oscillation Roto-oscillation Vibration |
Edge out with slots | Partially sharp with slots | No | Yes |
| Dr. U. Graft Zeus™ | Rotation (Oscillation for thicker skin) |
Rotation (Innate depth stop) (Oscillation for thicker skin) |
Flared (textured) | Sharp | Innate (no physical depth stop) | No |
| ARTAS | Scoring | Rotation with programmable depth stop | 1st Cylindrical/round 2nd Cylindrical/round |
Semi-sharp, inner bevel, 2-or 4-pronged dull |
Yes | No |
| Device | Hydration | Touch response | Foot pedal | Long hair extraction | Pre programmed parameters for harvesting grafts | Approximate price (USD) |
| NeoGraft/Omnigraft | No | No | No | No | No | $5 465.00 |
| Programmable PCID | No | No | Yes | No | No | $25,000.00 |
| Harris powered safe scribe (SAFE) | No | No | Yes | No | No | $320.00 |
| True device: Aseptico Porta-Tip-AEU-03SS Osada SH28S handpiece |
No | No | No | No | No | $695.00 |
| KD’s FUE Station | Yes | No | Yes | No | No | $4,270.00 |
| Shiao 4-D Device | No | Yes | No | No | No | $9,700.00 |
| Devroye WAW system | No | No | Yes | No | No | $10,944.50 |
| Devroye WAW DUO FUE system | No | No | Yes | No | No | $16,368.00 |
| Trivellini system | No | Yes | Yes | No | No | $9,990.00 |
| Trivellini Long hair™System | No | Yes | Yes | Yes | No | $12,990.00 |
| Dr. U. Graft Zeus™ | Yes | No | Yes | Yes | Yes | $25,000.00 |
| ARTAS | No | No | No | No | No | $76,517.00 |
PCID: Power Cole isolation device, FUE: Follicular unit excision
As per author’s experience, beginners in the field must choose the devices for graft harvesting based on the type of hair to be extracted and the site of the donor area, as summarized in Table 2.
| Donor site | Type of hair | Devices |
|---|---|---|
| Scalp | Straight | 1. KSK motor 2. PCID 3. KD’S FUE station 4. NeoGraft 5. True device 6. ARTAS Robotic system 7. Dr U Graft Zeus device 8. Trivellini standard system 9. Devroye WAW DUO FUE system |
| Curly | 1. Dr U Graft Zeus device 2. Trivellini Standard system 3. Devroye WAW DUO FUE System |
|
| Long hair (unshaven) | 1.Dr U Graft Zeus device 2. Trivellini Long Hair system |
|
| Body | - | 1. Dr U Graft Zeus device 2. Devroye WAW DUO FUE system 3. Trivellini Standard system |
The above recommendations are to guide the beginners only, not in order of the efficacy of devices. PCID: Power Cole Isolation Device, FUE: Follicular unit excision
The author prefers a KSK surgical motorised device which uses the rotation motion for graft extraction and is compatible with all types of punches [Figure 11a and b].
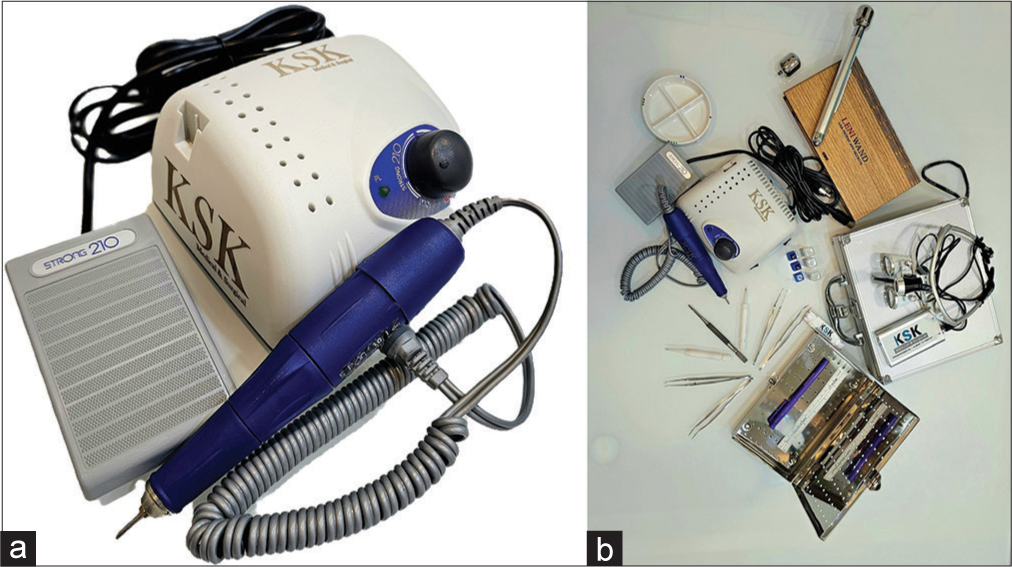
- (a) KSK hair transplant motor (Courtesy of KSK Surgicals). (b) KSK advanced hair transplant kit (Courtesy of Surgicals).
CONCLUSION
Hair transplant surgeons often employ the FUE technique, making it essential for them to be familiar with the different available devices. An ideal graft harvesting system should possess several key attributes. It should operate at high extraction speeds while maintaining a zero transection rate to preserve the integrity of the grafts. The system should be multiphasic, allowing for smooth extraction of grafts from the scalp, beard, body, and long hair. Moreover, it should ensure proper sheathing of the grafts, particularly with a sufficient amount of tissue around the lower third for successful transplantation. In addition, it must be cost-effective, with minimal ongoing operational expenses, making it an efficient and economical choice for practitioners. As the quest for an ideal system continues, it is equally important to understand how these systems can be customized according to the unique hair and skin characteristics of each patient.
Ethical approval
Institutional Review Board approval is not required.
Declaration of patient consent
Patient’s consent not required as there are no patients in this study.
Conflicts of interest
The principal author is the owner of KSK surgicals, which is manufacturer of KSK motor device and official distributor of Dr. U Graft Zeus system in India.
Use of artificial intelligence (AI)-assisted technology for manuscript preparation
The authors confirm that there was no use of artificial intelligence (AI)-assisted technology for assisting in the writing or editing of the manuscript, and no images were manipulated using AI.
Financial support and sponsorship: Nil.
References
- Autografts in alopecia and other selected dermatological conditions. Ann N Y Acad Sci. 1959;83:463-79.
- [CrossRef] [PubMed] [Google Scholar]
- Follicular unit extraction: Minimally invasive surgery for hair transplantation. Dermatol Surg. 2002;28:720-8.
- [CrossRef] [PubMed] [Google Scholar]
- Battle of the punches: Comparison of transection rates of different punches during FUE. J Cosmet Dermatol. 2019;18:1837-40.
- [CrossRef] [PubMed] [Google Scholar]
- An analysis of follicular punches, mechanics, and dynamics in follicular unit extraction. Facial Plast Surg Clin N Am. 2013;21:437-47.
- [CrossRef] [PubMed] [Google Scholar]
- Follicular unit extraction: Evolution of a technology. J Transplant Technol Res. 2016;6:1-14.
- [CrossRef] [Google Scholar]
- Powered FU extraction with the short-ARC-oscillation flat punch FUE system (SFFS) Hair Transpl Forum Int. 2016;26:129, 134-6
- [CrossRef] [Google Scholar]
- Available from: https://www.devroyeinstruments.com [Last accessed on 2020 May 09]
- An innovation in suction assisted FUE. Hair Transpl Forum Int. 2016;26:58-9.
- [CrossRef] [Google Scholar]
- New methodology and instrumentation for follicular unit extraction: Lower follicle transection rates and expanded patient candidacy. Dermatol Surg. 2006;32:56-62.
- [CrossRef] [Google Scholar]
- Powered blunt dissection with the SAFE system for FUE (part 1) Hair Transpl Forum Int. 2010;20:188-9.
- [CrossRef] [Google Scholar]
- Powered blunt dissection with the SAFE system for FUE Part II: The extraction phase. Hair Transpl Forum Int. 2011;21:16-7.
- [CrossRef] [Google Scholar]
- Advances in hair transplantation technology. Multiphasic device for follicular unit excision. Skinmed. 2019;17:241-6.
- [Google Scholar]
- Trivellini flared. Available from: https://www.trivellinitech.com/product/trivellini-flared [Last accessed on 2020 Jan 20]
- [Google Scholar]
- Coming soon - Dr. UGraftTM sonic FUE. Available from: https://ugraft.com/news/coming-soon-drugraft-sonic-fue [Last accessed on 2020 Mar 30]
- [Google Scholar]
- Cole instruments. Available from: https://www.coleinstruments.com [Last accessed on 2020 May 09]
- [Google Scholar]
- History of FUE: A retrospective In: Lam SM, Williams KL, eds. Hair transplantation 360: Follicular Unit Extraction (FUE) Vol 4. (1st ed). New Delhi, India: Jaypee Brothers Medical Publishers; 2016-7.
- [CrossRef] [Google Scholar]
- A 2019 guide to currently accepted FUE and implanter terminology. Hair Transpl Forum Int. 2019;29:98-106.
- [CrossRef] [Google Scholar]
- Automated forceps expansion technique (AFET) A teaching tool for FUE graft implantation ISHRS Prague World Congress Csech Republic 2017.
- [Google Scholar]
- The edge out punch: An advancement that reduces transections in follicular unit excision hair transplantation. J Cosmet Dermatol. 2020;19:2194-200.
- [CrossRef] [PubMed] [Google Scholar]
- Trivellini long hairTM. Available from: https://www.trivellinitech.com/product/trivellini-long-hair [Last accessed on 2020 Mar 30]
- [Google Scholar]
- What is the Dr. UGraftTM hair transplant system? Available from: https://ugraft.com/what-is-drugraft-hair-transplant-system [Last accessed on 2020 Mar 30]
- [Google Scholar]
- A novel follicular unit excision device for all-purpose hair graft harvesting. Clin Cosmet Investig Dermatol. 2021;14:1657-74.
- [CrossRef] [PubMed] [Google Scholar]
- Robotic hair transplantation: Experience and results of first human clinical testing In: Presentation at the ISHRS Annual Meeting, Las Vegas (NV), September 26-30, 2007.
- [Google Scholar]
- The latest innovations in hair transplantation. Facial Plast Surg. 2011;27:366-77.
- [CrossRef] [PubMed] [Google Scholar]
- Robotic assisted follicular unit extraction for hair restoration: Case reports. Cosmet Dermatol. 2012;25:284-7.
- [Google Scholar]
- Ergonomics in hair restoration surgeons. J Cos Dermatol. 2015;15:66-71.
- [CrossRef] [PubMed] [Google Scholar]
- Robotic surgery: With new technology come new opportunities? Pract Dermatol 2012:1-2.
- [Google Scholar]




